











QR Code

About Us
Products
Contact Us

Phone

E-mail

Address
No. 22, Hongyuan Road, Guangzhou, Guangdong Province, China

SLAM, Also known as synchronous positioning and map construction, it is a crucial core technology in the field of mobile robot technology. It allows robots to simultaneously estimate their own position and construct environmental maps in unknown environments, which is the key to achieving autonomous navigation and exploration.
1、 SLAM technology principle
The core idea of SLAM technology is to achieve self localization and map construction of robots in unknown environments through the fusion and processing of sensor data (such as LiDAR, cameras, etc.). Specifically, SLAM technology consists of two main parts: front-end odometry and back-end optimization.
1. Front end odometer: This section is mainly responsible for estimating the robot's motion trajectory through sensor data. It calculates the relative displacement and attitude transformation of the robot by analyzing the changes in sensor data at consecutive time points. Common methods include feature matching, optical flow, etc. The output of the front-end odometer is a preliminary estimate of the robot's pose, but due to sensor noise and accumulated errors, these estimation results are often not accurate enough.
2. Backend optimization: In order to improve positioning accuracy and map consistency, SLAM technology introduces a backend optimization process. This section uses historical data, loop detection, and other methods to calibrate and optimize the results of the front-end odometer. The commonly used optimization methods include filter based methods (such as extended Kalman filter, particle filter, etc.) and graph based optimization methods. These methods can effectively reduce cumulative errors and improve the accuracy of robot positioning and map construction.
3、 The Application of SLAM Technology in Mobile Robots
SLAM technology, as one of the core technologies of mobile robots, has broad application prospects in multiple fields. Here are several typical application cases:
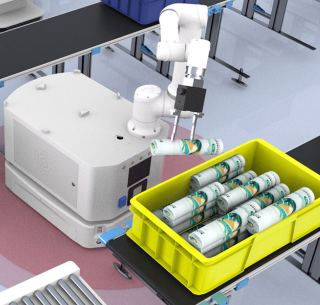
1. Autonomous navigation: In the fields of warehousing and logistics, machining, etc., mobile robots need to achieve autonomous navigation functions. By utilizing SLAM technology, robots can perceive their surroundings in real time and construct maps, thus planning the optimal path and autonomously heading to the target location. This greatly improves the work efficiency and autonomy of robots.
2. Environmental exploration and modeling: In unknown environments, mobile robots can use SLAM technology for environmental exploration and modeling. By continuously collecting sensor data and updating map information.
3. Human machine interaction and intelligent services: With the continuous development of artificial intelligence technology, mobile robots are increasingly being applied in the fields of human machine interaction and intelligent services. By utilizing SLAM technology to achieve precise positioning and scene recognition, robots can provide users with a more personalized and intelligent service experience. For example, guiding customers in shopping malls and accompanying elderly people at home have broad application prospects.
SLAM technology, as one of the core technologies of mobile robots, provides strong support for achieving autonomous navigation and environmental exploration. At the same time, in the face of complex and ever-changing application scenarios and constantly upgrading user demands, we also need to continue to pay attention to and research new SLAM technologies and methods to promote the further development and application of mobile robot technology.
No. 22, Hongyuan Road, Guangzhou, Guangdong Province, China
